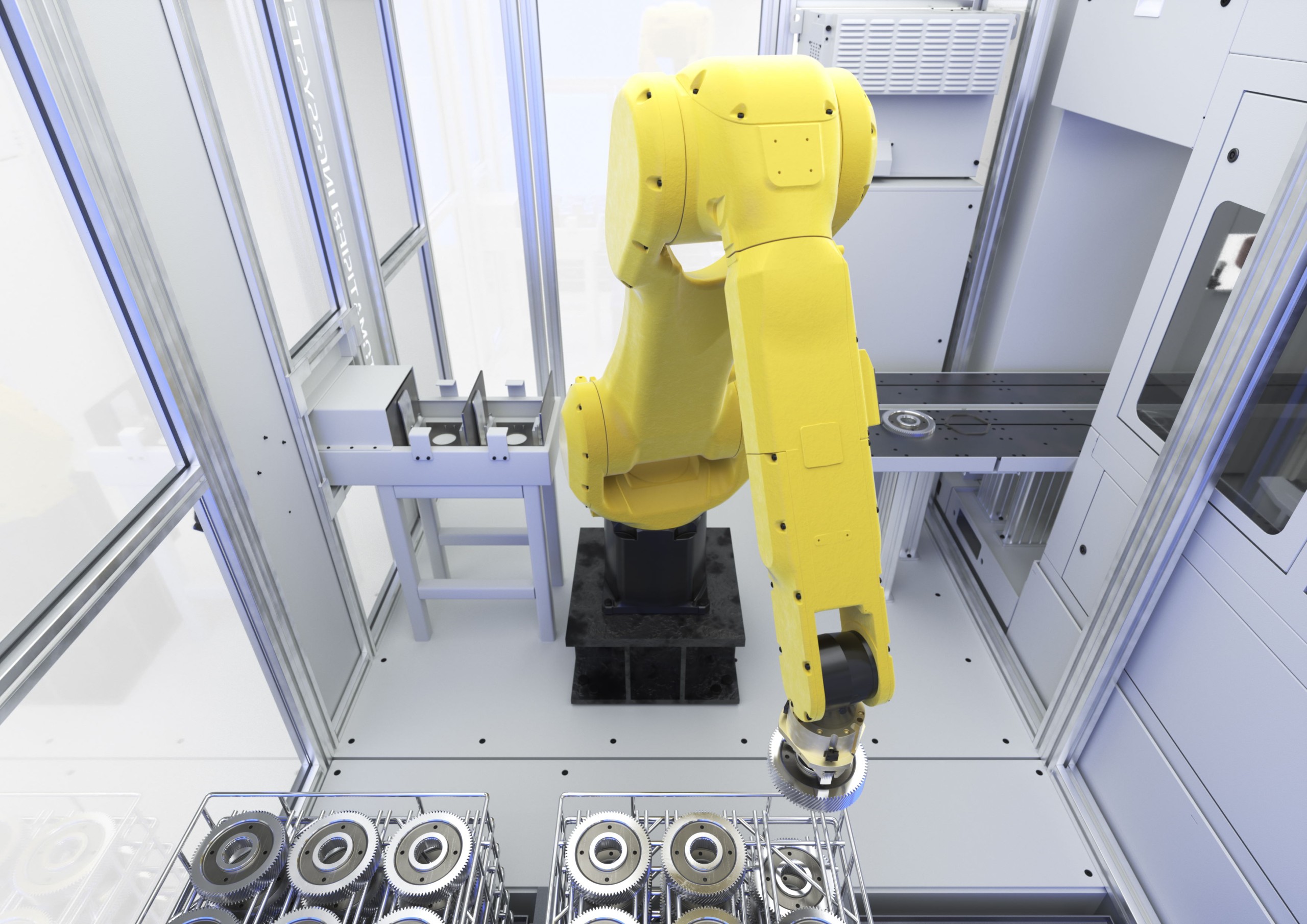
Die Produktionsexperten von EMAG verketten ihre Pick-up-Maschinentechnologie mit sehr individuellen Roboterlösungen, die präzise entlang der Anforderungen des Werkstücks und des Produktionsprozesses konstruiert werden.
(Quelle: EMAG)
Rund 3,5 Millionen Roboter sind mittlerweile weltweit in der industriellen Produktion im Einsatz, so der „World Robotics 2022“-Report der International Federation of Robotics (IFR). Dabei zählt Deutschland zu den fünf größten Robotermärkten der Welt. Warum das so ist, zeigen aktuelle Beispiele von EMAG: Die Spezialisten kombinieren ihre Hochleistungsmaschinen mit ganz verschiedenen Roboterzellen – und sorgen so nicht nur für hocheffiziente Prozesse bei der Be- und Entladung der Maschinen, sondern integrieren auch zusätzliche Stationen rund um Qualitätssicherung, Beschriftung, Reinigung und einiges mehr. Doch was ist die übergreifende Zielsetzung, wenn Roboter zum Einsatz kommen? „Im Zentrum stehen immer die Anforderungen des Werkstücks und des dazugehörigen Produktionsprozesses“, erklärt Jürgen Maier, Leiter der Business Unit Drehen bei EMAG. „Entscheidende Fragen sind dabei zum Beispiel, welche Losgrößen in einem bestimmten Zeitraum gefertigt werden und wie autark die Lösung arbeiten soll. In jedem Fall sind wir sehr flexibel und passen uns in vielfacher Weise an die vorhandene Produktionsumgebung oder die Platzverhältnisse an.“
(Mit dem Schubladensystem werden die Werkstücke auf verschiedenen Ebenen dem Roboter bereitgestellt. Während die Schubladen vom Werker bestückt werden, versorgt der Roboter in der Zelle die Maschine mit Werkstücken. Quelle: EMAG)
Mit Abführbändern, Palettierern oder Schubladen
Wie unterschiedlich die Roboterlösungen sind, zeigt ein Blick auf Details: Die Zuführung der Teile kann zum Beispiel über Förderbänder, in Paletten, auf Werkstückträgern wie zum Beispiel Körben oder sogar als Schüttgut erfolgen – mithilfe dieser Systeme „bedient“ sich der Roboter, wenn er neue Teile aufnimmt beziehungsweise fertig ablegt, wobei jede Lösung andere Stärken und Grundbedingungen aufweist. So sind Gurt- oder Scharnierbänder beispielsweise eine ideale Variante, wenn der Teilefluss reibungslos von einer vorgelagerten Produktionslösung zur Maschine erfolgen soll. Der Roboter kann die Teile dann einfach vom Band abgreifen und später wieder ablegen, wobei die Bänder in unterschiedlicher Weise angeordnet werden – je nach Platzsituation oder gewünschtem Teilefluss. Pneumatische Stopper sorgen für die Vereinzelung der Teile. Zudem ist es möglich, die Werkstück-Ausrichtung auf dem Band per Kamera zu erkennen. Beim Bin-Picking, dem sogenannten „Griff in die Kiste“, können die Rohteile sogar komplett chaotisch, also als Schüttgut zugeführt werden. Ein 3D-Kamerasystem ermittelt dann aus einer aufgenommenen Punktewolke sowohl Position als auch Orientierung jedes einzelnen Werkstücks und berechnet daraus die jeweils optimale Anfahrstrategie für den Roboter. Diese Technologie eignet sich daher perfekt für den Einsatz ganz am Anfang der Wertschöpfungskette, da dadurch eine manuelle Vororientierung der Rohteile komplett entfallen kann.
Im Unterschied dazu setzt der Einsatz von Palettierern einen „geordneten“ Start voraus: Dabei erfolgt die Be- und Entladung des Systems zum Beispiel über einen Korb-Wagen. Er enthält übereinander gestapelte Gitterkörbe mit entsprechenden Formnestern, in denen sich die Teile befinden – also eine relativ große Menge pro Wagen, den ein Bediener einfach in eine definierte Position schiebt, von der aus der Roboter zugreifen kann. Der Wagen mit Fertigteilen befindet sich an einer anderen Position. „Es kommt bei einer solchen Lösung unter anderem darauf an, dass man die Taktzeit der Maschine und die gewünschten Mannstunden an der Maschine miteinander in Relation setzt. Wenn also der Bearbeitungstakt innerhalb der Maschine nur wenige Sekunden beträgt und man gleichzeitig einen minimalen Bedienaufwand an der Maschine anstrebt, kann das Automationskonzept etwa mit unserer Stapeleinheit SCS 4 erweitert werden, um die Autonomie des Gesamtsystems trotz kurzer Taktzeiten hoch zu halten. Das sind aber genau jene Berechnungen, die wir bei jeder Roboterlösung durchführen und dementsprechend den Kunden beraten“, erklärt Maier.
Eine dritte Variante wäre die Beladung per Schubladensystem: Hier werden die Werkstücke in kundeneigenen Werkstückträgern über pneumatisch angetriebene Schubladen dem Arbeitsraum des Roboters zugeführt. Die Schubladen sind übereinander angeordnet, wodurch bei gleichem Footprint ein höheres Speichervolumen und somit eine höhere Autonomie erzielt wird. Im Übrigen kann der Wechsel der Werkstückträger durch den Bediener komplett taktzeitparallel erfolgen. Der Roboter kann dadurch auch bei offener Beladetür weiterarbeiten, womit Unterbrechungen in der Produktion vermieden werden.
(Drahtgitter-Körbe sind in der Produktion weit verbreitet. Die Zuführung zur Roboterzelle erfolgt in Stapeln auf Bodenrollern. Neben den Werkstücken werden hier auch die Körbe vom Roboter gehandhabt. Quelle: EMAG)
Zahl der Roboterlösungen nimmt zu
Für alle diese Lösungen gilt: Die Ausstattungsmöglichkeiten der einzelnen Roboterzelle sind groß. So ist es etwa denkbar, eine Statistische Prozesskontrolle (SPC) zu integrieren. Hier werden im einfachsten Fall einzelne Teile zur Qualitätssicherung regelmäßig ausgeschleust, vermessen und wieder eingeschleust. Darüber hinaus kann aber auch die Messstation selbst in die Zelle integriert werden, sodass die Messung inklusive Messwerkrückführung zur Maschine komplett automatisiert ablaufen kann. Ebenso ist es möglich, kamerabasierte Prüfsysteme, ein Greiferwechselsystem inklusive Greiferbahnhof für die Verarbeitung eines großen Werkstückspektrums, kleine Wasch- und Reinigungsstationen, Entgratsysteme oder Laser- beziehungsweise Gravierstationen innerhalb der Roboterzelle zu platzieren. Die jeweilige Station wird dann ebenso vom Roboter be- und entladen. Es ergibt sich also ein kontinuierlicher Teilefluss über verschiedene Technologien hinweg. Für einen nachhaltigen Erfolg bei allen Kunden setzt das Unternehmen bei der Planung von Automationszellen auf computerbasierte Simulationen. Die Experten überprüfen unter anderem Faktoren wie Taktzeit, Erreichbarkeiten, den Materialfluss und die Ausbringung bei großen Fertigungslinien. Ähnlich wichtig ist die virtuelle Inbetriebnahme – also das Erproben der Abläufe und Schnittstellen am digitalen Zwilling der Fertigungslinie. So lassen sich unvorhergesehene Fehler aufdecken und in einer frühen Entwicklungsphase beseitigen. Und: Die „reale“ Inbetriebnahme läuft später viel schneller ab.
Stand: 16.12.2025
Es ist für uns eine Selbstverständlichkeit, dass wir verantwortungsvoll mit Ihren personenbezogenen Daten umgehen. Sofern wir personenbezogene Daten von Ihnen erheben, verarbeiten wir diese unter Beachtung der geltenden Datenschutzvorschriften. Detaillierte Informationen finden Sie in unserer Datenschutzerklärung.
Einwilligung in die Verwendung von Daten zu Werbezwecken
Ich bin damit einverstanden, dass die WIN-Verlag GmbH & Co. KG, Chiemgaustraße 148, 81549 München einschließlich aller mit ihr im Sinne der §§ 15 ff. AktG verbundenen Unternehmen (im weiteren: Vogel Communications Group) meine E-Mail-Adresse für die Zusendung von redaktionellen Newslettern nutzt. Auflistungen der jeweils zugehörigen Unternehmen können hier abgerufen werden.
Der Newsletterinhalt erstreckt sich dabei auf Produkte und Dienstleistungen aller zuvor genannten Unternehmen, darunter beispielsweise Fachzeitschriften und Fachbücher, Veranstaltungen und Messen sowie veranstaltungsbezogene Produkte und Dienstleistungen, Print- und Digital-Mediaangebote und Services wie weitere (redaktionelle) Newsletter, Gewinnspiele, Lead-Kampagnen, Marktforschung im Online- und Offline-Bereich, fachspezifische Webportale und E-Learning-Angebote. Wenn auch meine persönliche Telefonnummer erhoben wurde, darf diese für die Unterbreitung von Angeboten der vorgenannten Produkte und Dienstleistungen der vorgenannten Unternehmen und Marktforschung genutzt werden.
Meine Einwilligung umfasst zudem die Verarbeitung meiner E-Mail-Adresse und Telefonnummer für den Datenabgleich zu Marketingzwecken mit ausgewählten Werbepartnern wie z.B. LinkedIN, Google und Meta. Hierfür darf die Vogel Communications Group die genannten Daten gehasht an Werbepartner übermitteln, die diese Daten dann nutzen, um feststellen zu können, ob ich ebenfalls Mitglied auf den besagten Werbepartnerportalen bin. Die Vogel Communications Group nutzt diese Funktion zu Zwecken des Retargeting (Upselling, Crossselling und Kundenbindung), der Generierung von sog. Lookalike Audiences zur Neukundengewinnung und als Ausschlussgrundlage für laufende Werbekampagnen. Weitere Informationen kann ich dem Abschnitt „Datenabgleich zu Marketingzwecken“ in der Datenschutzerklärung entnehmen.
Falls ich im Internet auf Portalen der Vogel Communications Group einschließlich deren mit ihr im Sinne der §§ 15 ff. AktG verbundenen Unternehmen geschützte Inhalte abrufe, muss ich mich mit weiteren Daten für den Zugang zu diesen Inhalten registrieren. Im Gegenzug für diesen gebührenlosen Zugang zu redaktionellen Inhalten dürfen meine Daten im Sinne dieser Einwilligung für die hier genannten Zwecke verwendet werden.
Recht auf Widerruf
Mir ist bewusst, dass ich diese Einwilligung jederzeit für die Zukunft widerrufen kann. Durch meinen Widerruf wird die Rechtmäßigkeit der aufgrund meiner Einwilligung bis zum Widerruf erfolgten Verarbeitung nicht berührt. Um meinen Widerruf zu erklären, kann ich als eine Möglichkeit das unter https://kontakt.vogel.de/de/win abrufbare Kontaktformular nutzen. Sofern ich einzelne von mir abonnierte Newsletter nicht mehr erhalten möchte, kann ich darüber hinaus auch den am Ende eines Newsletters eingebundenen Abmeldelink anklicken. Weitere Informationen zu meinem Widerrufsrecht und dessen Ausübung sowie zu den Folgen meines Widerrufs finde ich in der Datenschutzerklärung, Abschnitt Redaktionelle Newsletter.
„Insgesamt kann man sagen, dass immer mehr Roboterlösungen an unseren Maschinen zum Einsatz kommen“, fasst Jürgen Maier zusammen. „Denn wir verfügen über eine Vielzahl von Maschinen, die auf Basis der Pick-up-Technologie bereits über eine interne Automatisierung verfügen. Folglich können wir diese Lösungen per Roboter relativ einfach in ganzheitliche Produktionssysteme einbinden und einen durchgehenden Teilefluss über viele Technologien hinweg etablieren. Die manuellen Tätigkeiten entlang der Wertschöpfungskette werden also kontinuierlich weniger.“

:quality(80)/p7i.vogel.de/wcms/56/c7/56c74f2dae49f8f2eb2ac60998543163/denso-20robotics-20hsr-20applikation-pressefoto001-5371x3019v1.jpeg "Auf der Hannover Messe 2026 stellt Denso seine Scara-Roboter der HSR-Reihe vor. (Bild: Denso Robotics)")
:quality(80)/p7i.vogel.de/wcms/bd/99/bd992b1c7fc22ff9069e9f91c19c5c65/0-hm26-cs-main-portrait-de-1080x608v1.jpeg "Center Stage: Vordenkerinnen und Vordenker, führende Köpfe aus Wirtschaft, Wissenschaft und Politik sowie mutige Innovatorinnen und Innovatoren teilen nicht nur ihre Erfolgsgeschichten – sie zeigen, wie die Industrie von morgen heute schon entsteht. (Bild: Deutsche Messe AG)")
:quality(80)/p7i.vogel.de/wcms/f4/56/f4562d130ea85afb9d89970f6ef87077/hm25-13-000761-4000x2250v1.jpeg "Proalpha präsentiert auf der Hannover Messe 2026 innovative End-to-End-Business-Anwendungen, die gezielt die industrielle Wertschöpfung im Mittelstand fördern.
(Bild: Deutsche Messe AG)")
:quality(80)/p7i.vogel.de/wcms/23/15/2315813195b5541ee4948179e6de1435/itac-hm-2026-1707x960v1.png "Künstliche Intelligenz (KI) nutzt Produktionsdaten und -wissen für schnellere Entscheidungen. Auf der Hannover Messe zeigt iTAC, wie KI Entscheidungsintelligenz direkt in die Fabrik bringt und eine gemeinsame Entscheidungsbasis schafft, die Unternehmen effizienter agieren lässt.
(Bild: iTAC Software AG (KI-generiert))")
:quality(80)/p7i.vogel.de/wcms/c3/41/c341b24a0806213b8fe8656cbd7a38ae/0326-inform-simpleplanner-vorschaubild-1000x563v1.jpeg "Der neue Simple Planner visualisiert Montageaufträge, Planungsszenarien und Liefertermine in einer übersichtlichen, Cloud-basierten Anwendung. (Bild: Inform)")
:quality(80)/p7i.vogel.de/wcms/4a/ac/4aac4d51a6763e3e143411c32ae31af1/2026-evotools-generische-datenpflege-dispositionsdaten-mit-ki-1000x563v1.jpeg "(Bild: )")
:quality(80)/p7i.vogel.de/wcms/68/99/6899960a218934b2210917e1a3c766f8/fat0225-1a-999x562v1.jpeg "Der Rebel Move ermöglicht den kostengünstigen Einstieg in die Automatisierung von Logistikprozessen. (Bild: Igus)")
:quality(80)/p7i.vogel.de/wcms/e5/9d/e59d7fd101408cfced77e5429207160b/grc-2026-partnerschaft-schunk-dlr-03-2026v1.jpeg "Startpunkt der nächsten Entwicklungsstufe: Mit der Unterzeichnung einer Absichtserklärung auf der German Robotics Conference 2026 in Köln setzen Timo Gessmann (CTO Schunk) und Prof. Dr.-Ing. Alin Albu-Schäffer (Institutsdirektor DLR-Institut für Robotik und Mechatronik) ein gemeinsames Zeichen. (Bild: DLR)")
:quality(80)/p7i.vogel.de/wcms/e4/4a/e44ae608663a725b537edce58834d527/roboter-gorodenkoff-adobestock-1707533154-neu-1200x674v1.jpeg "(Bild: © Gorodenkoff/stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/56/34/56349cd482a9c71898d0da33192a29a3/futuristic-technology-concept-4864x2737v1.jpeg "Transparenz entlang der gesamten logistischen Kette gehört heute zu den wichtigsten Voraussetzungen für effiziente, belastbare Lieferketten. (Bild: freepik)")
:quality(80)/p7i.vogel.de/wcms/01/fa/01fa00f0f78c03f80a33b93bdd1c1c96/consense-grc-rgb-1800x1013v1.jpeg "Gut vorbereitet auf die NIS2: Mit ConSense GRC ISMS strukturiert umsetzen, EU-Richtlinie transparent managen. (Bild: ConSense )")
:quality(80)/p7i.vogel.de/wcms/e8/b3/e8b3d63f5741c5bb51955385e142e50a/media-industrie40barometer26-abb14-2-800x450v1.jpeg "Grafik: Einschätzung des Einflusses von KI in den nächsten 5 Jahren. (Bild: MHP)")
:quality(80)/p7i.vogel.de/wcms/9f/83/9f835e65c1ea0b72b30cf6642f5b1e62/dsc08156-b2-6000x3373v1.jpeg "Smart, kompakt, kräftig: Miles ist der neue AMR der Zimmer Group - speziell auf die Bedürfnisse der Intralogistik zugeschnitten. (Bild: Zimmer Group)")
:quality(80)/p7i.vogel.de/wcms/93/ff/93ffe2b7d96274fab131099eeee0eb12/predictive-maintenance-in-lang-lsmart-steuerung-1200x675v1.jpeg "Die Steuerung LSmart Express von Lang unterstützt Predictive Maintenance: Eine Schleppfehler‑Analyse erkennt frühzeitig Verschleiß und ermöglicht zustandsorientierte Wartungsplanung. (Bild: Lang)")
:quality(80)/p7i.vogel.de/wcms/9a/15/9a15af97936b2df6b8cead86330f5949/psi-20fa-20studie-20ki-bild-201-997x561v1.jpeg "Immer mehr Unternehmen erwägen die Einführung von KI-Systemen in der Logistik. (Bild: Old Man Stocker/Adobe Stock; edit by PSI Software SE)")
:quality(80)/p7i.vogel.de/wcms/ed/3e/ed3eaf71390677636f13cf6857aa93a7/260325-noxtua-telekom-3866x2175v1.jpeg "Die Industrial AI Cloud der Telekom bietet Noxtua eine nahtlose Integration in den „Deutschland-Stack“. (Bild: amgun/iStock; Montage: Evelyn Ebert Meneses)")
:quality(80)/p7i.vogel.de/wcms/4b/df/4bdf75bbcaed8b8574436b70edb12f73/-pge0259-bearbeitet-heller-1000x563v1.jpeg "Die mobilen Devices an den Staplern sind mit ergonomischen SAP EWM Benutzeroberflächen ausgestattet und ermöglichen den Mitarbeitenden maximale Transparenz. (Bild: IGZ)")
:quality(80)/p7i.vogel.de/wcms/2d/05/2d05f03e8f311195b93064c94851a923/kooperation-sew-eurodrive-safelog-2999x1688v1.jpeg "Dr. Hans Krattenmacher (SEW-Eurodrive; links im Bild) und Michael Wolter (Safelog) besiegeln auf der LogiMAT die Kooperation. (Bild: SEW-Eurodrive)")
:quality(80)/p7i.vogel.de/wcms/fd/7c/fd7c24f47ba67aedba30676fda303b78/bild1-gundling-erlinger-lr-1181x664v1.jpeg "Benedikt Gundling (links), Produktmanager Digitale Produkte bei Grob, und Christian Erlinger (rechts), Geschäftsführer bei Coscom. „Das Besondere an unserer Kooperation ist, dass wir unsere Kernkompetenzen bündeln und so ideale Lösungen für unsere gemeinsamen Kunden schaffen“, erzählt Gundling. (Bild: Coscom)")
:quality(80)/p7i.vogel.de/wcms/93/0a/930a26a7ebb5b6054ac125c289fa7e34/hawe-08-4921x2770v1.jpeg "Energiemanagement bei Hawle: Für die Verbindung sorgen mittlerweile auch Stromabgangskästen von Janitza, die mit einem Netzanalysator UMG 96-PQ-L ausgestattet sind. (Bild: Martin Witzsch)")
:quality(80)/p7i.vogel.de/wcms/6c/3b/6c3b13709ffb84a55113a6a34f176e3a/itm-2b2025-2b--2bindustry-2bfindings-20-281-29v1.jpeg "Der Siemens Infrastructure Transition Monitor ist eine alle zwei Jahre erscheinende Siemens-Studie, bei der 1.400 Führungskräfte und Regierungsvertreter in 19 Ländern zu den Bereichen Energie, Gebäude und Industrie befragt werden. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/11/a1/11a1f2a750ce7954419a06a309f07d58/2adobestock-1773719078-20add-20photo-7751x4363v1.jpeg "Bei der Überarbeitung der ISO-Normen liegt der Fokus auf Klimawandel, Resilienz, Ethik und „People-Themen“. (Bild: ©ADD Photo/stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/21/d1/21d1708b5eb2eb3ab6475beea7718889/hm26-13-000057-4000x2248v1.jpeg "Industrielle KI im Fokus der Hannover Messe 2026 (20.–24. April): Die Weltleitmesse zeigt praxisnahe Anwendungen – von Automatisierung bis Physical AI.
(Bild: Deutsche Messe AG)")
:quality(80)/p7i.vogel.de/wcms/91/bf/91bf6a979866426af7b80abc5f8e3edb/pressefoto-deutscher-nachhaltigkeitspreis-preisstatuette-fotocredit-frank-fendler-2021-1000x563v1.jpeg "Die Auszeichnung wird vergeben von der Stiftung Deutscher Nachhaltigkeitspreis e.V. in Zusammenarbeit mit kommunalen Spitzenverbänden, Wirtschaftsvereinigungen, zivilgesellschaftlichen Organisationen und Forschungseinrichtungen. (Bild: Frank Fendler)")
:quality(80)/p7i.vogel.de/wcms/07/c6/07c69434001a014ddd0b4548cf85494a/motek-2024-126-scaled-uai-2560x1097-1952x1097v1.jpeg "Die Parallelität von Motek/Bondexpo und Vision 2026 verspricht nutzbringende Synergien für Produktionsunternehmen. (Bild: P. E. SCHALL GmbH & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/f6/52/f65288ef40bac946da08cf7221a9124d/b-26r-20--20at-interpack-20--20-1920x1079v1.jpeg "Automatisierungslösungen für die Verpackungsindustrie: Das Unternehmen zeigt in Düsseldorf Hardware- und Softwarelösungen für Steuerungssysteme, Antriebstechnik, HMI, Sicherheitstechnik und Mechatronik sowie offene Konnektivität und die nahtlose Integration neuer Technologien wie Bildverarbeitung und Simulation. (Bild: ABB Machine Automation/B&R)")
:quality(80)/p7i.vogel.de/wcms/5f/20/5f2080d84f56d8f87f5d3339527224d0/discrete-mfg-worker-using-appcentral-937x527v1.jpeg "Einblicke in die Praxis: Teilnehmer des Aptean AI Summit erfahren, wie KI-gestützte Entscheidungen in modernen Arbeitsumgebungen umgesetzt werden können. (Bild: Aptean)")
")

:quality(80)/p7i.vogel.de/wcms/e5/8c/e58cbe23aac27784396a7b982c6a3aca/sw-20mobile-20robot-3540x1992v1.jpeg "Mit der Mobile I-Cell präsentiert SW auf der automatica eine modulare
Automationslösung, die Montage-, Logistik- und Bearbeitungsstationen flexibel miteinander verbindet. (Bild: SW)")
:quality(80)/p7i.vogel.de/wcms/3d/f3/3df3a00dfa3856fe1eabd62dda0573d0/bild-201-1920x1079v1.jpeg "bild-201-1920x1079v1 (Bild: Fruitcore robotics)")